Creator of The Intelligent Drone Testbed for Control Systems and Verification
As part of my Master’s thesis, I designed and developed The Intelligent Drone Testbed for Control Systems and Verification at the University of Manitoba:
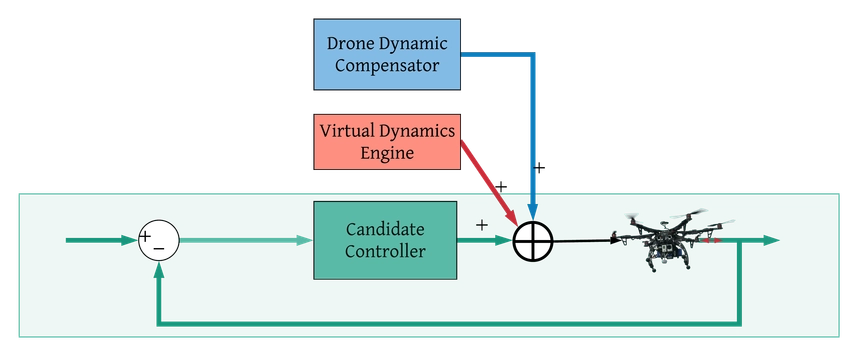
- Designed an intelligent drone testbed used for validation of new satellite or drone control algorithms and hardware.
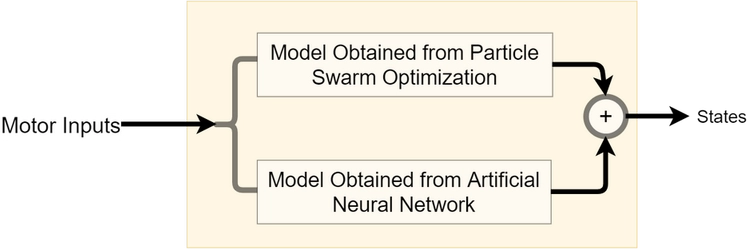
- Identified the dynamics of the quadcopters intelligently with minimal measuring using Particle Swarm Optimization (PSO)
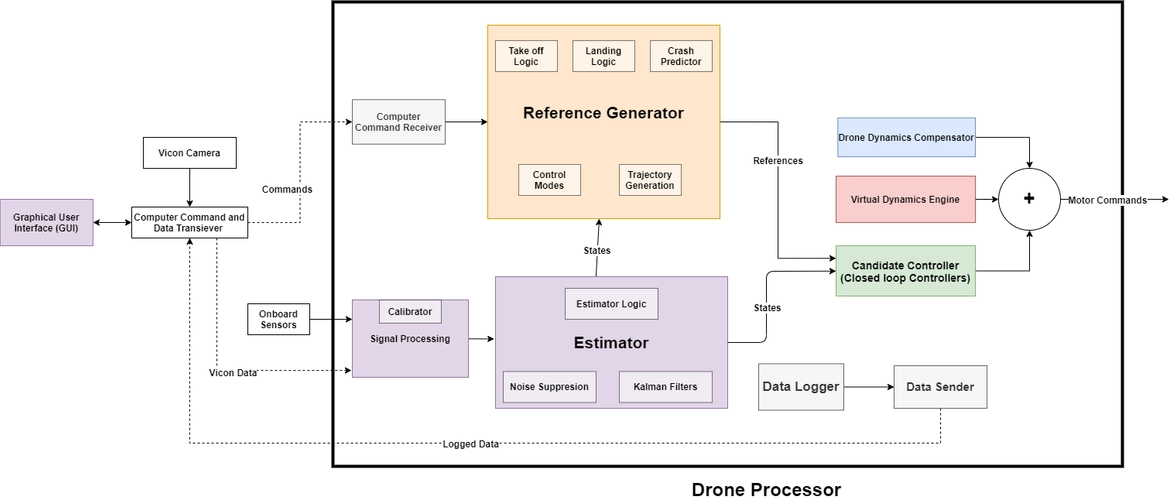
- Developed a custom onboard software for the drone to autonomously control the quadcopters’s motion and operations
- The leading member of the Drone Testbed Lab at the University of Manitoba.
- Assisted the capstone teams to use the testbed in different research areas such as using artificial neural networks as the controller for the drones
Related Links: